01 · What it fixes
The bottleneck is not the robot. It is the programming layer.
In labs, factories, and care settings, the people who know what the robot should do are rarely the people who know how to program it.
Alchemist closes that gap by shifting the user’s job from specifying logic to specifying outcomes.
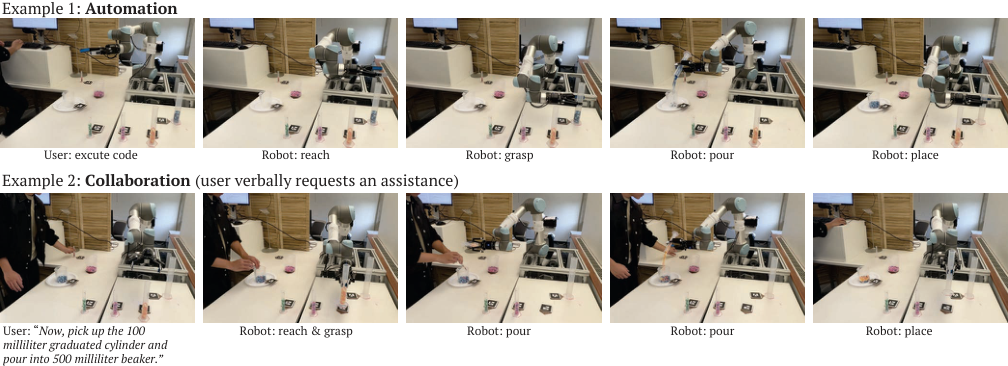
Outcome-first interaction
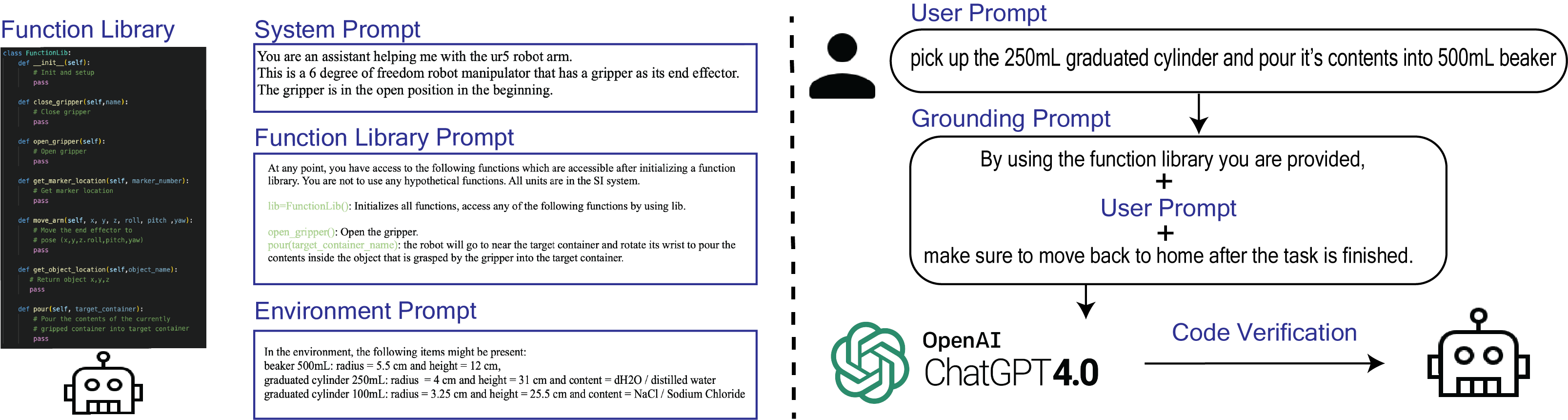
Users describe tasks in plain language instead of translating domain knowledge into robot code.
Built for domain experts
Scientists and operators can configure robot behavior without prior robotics experience.
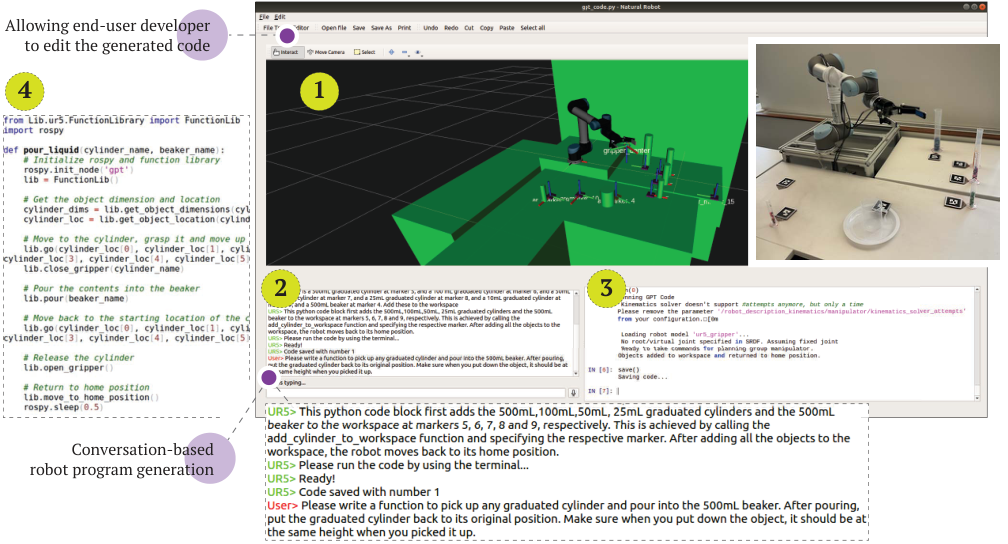
One programming surface
Conversation, code generation, verification, and execution live inside the same tool instead of across separate apps.