Supportive overlap
Cooperative agreement
The user is signaling understanding or agreement while the robot is speaking. The right move is acknowledgement, not surrender.
Interruption Handling for Robots
Interruptions are not all the same. Some signal agreement, some offer help, some ask for clarification, and some challenge the floor entirely. This project built a conversational framework that classifies interruption intent in real time and adapts the robot's response so the interaction stays socially coherent.
Existing systems usually choose one of two bad defaults. They either plow ahead as if the user never spoke, or they stop immediately every time speech overlaps. Human conversation works differently. People infer intent from timing, wording, and context. This project brings that same logic into robotic turn-taking.
Treating all interruptions as noise breaks down fast when the user is trying to redirect, clarify, or help.
Always stopping is better, but it still mishandles supportive overlaps that should be acknowledged without giving up the floor.
The strongest performance comes from treating interruption handling as a social inference problem, not a raw speech-detection problem.
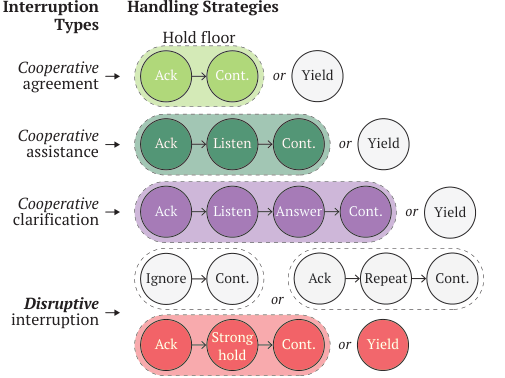
The taxonomy came from analyzing human conversation across discussions, interviews, and briefings. Instead of treating overlap as one event, the system distinguishes between supportive and disruptive moves in the interaction.
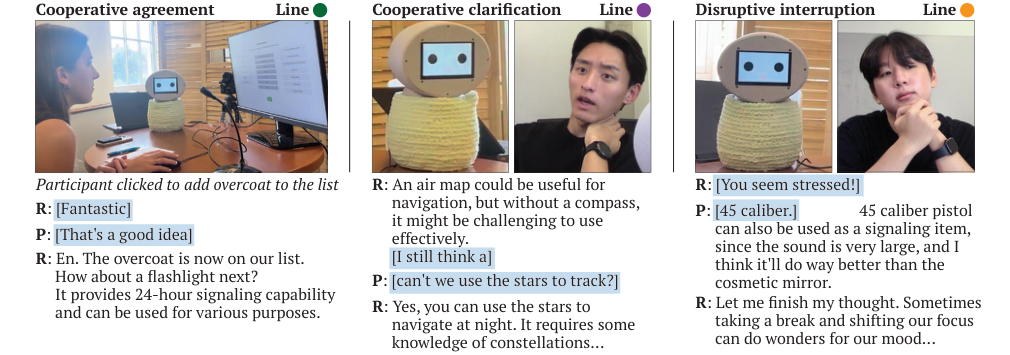
The same robot turn can be met with agreement, clarification, assistance, or disruption. Each requires a different response strategy.
Supportive overlap
The user is signaling understanding or agreement while the robot is speaking. The right move is acknowledgement, not surrender.
Supportive overlap
The user is helping the robot finish a point or supplying a needed word. The robot briefly listens, accepts the assist, and resumes.
Contextual pivot
The user needs an explanation before the conversation can continue. The robot answers in context, then returns to the original thread.
Floor challenge
The user is changing topic, disagreeing, or explicitly taking the floor. Here, the robot should yield or briefly wrap up before yielding.
The architecture is intentionally narrow and legible. It watches for user-initiated overlap, classifies the interruption with conversational context, and then selects the response policy that best fits the inferred intent.
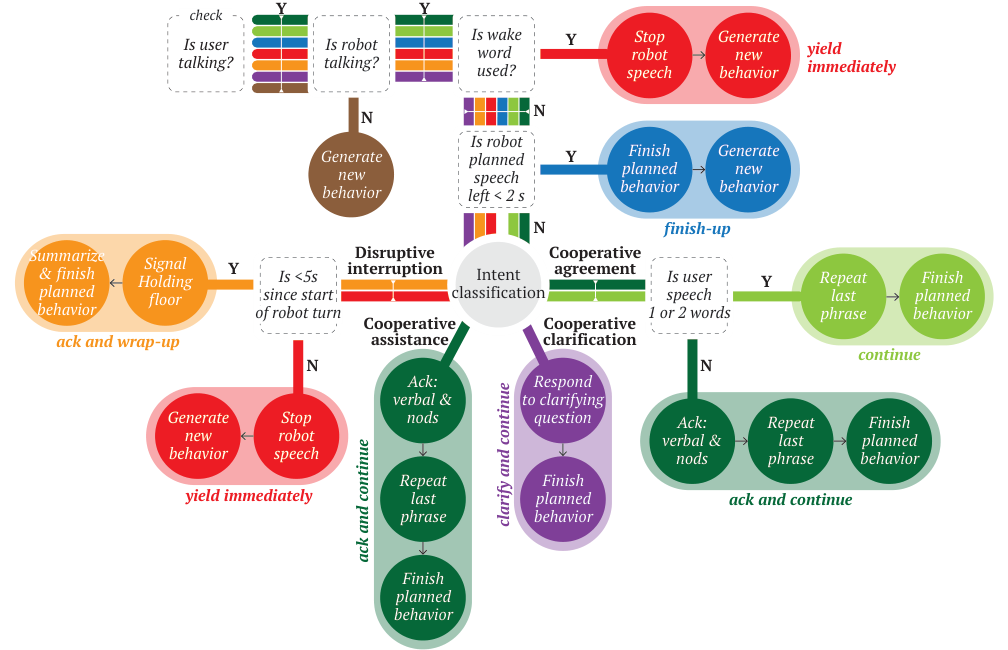
Three modules coordinate the interaction: user-initiated interruption detection, LLM-based intent classification, and handling logic tuned to each interruption type.
The system monitors simultaneous speech and filters out normal floor exchange so only genuine user-initiated interruptions enter the pipeline.
Conversational history and timing are passed into the classifier so the system can distinguish help, clarification, agreement, and disruption.
The robot then decides whether to hold the floor, acknowledge and continue, answer and resume, or yield gracefully.
Real conversation gets messy. This example shows the system handling compounded interruptions while keeping the interaction coherent and preserving conversational momentum.
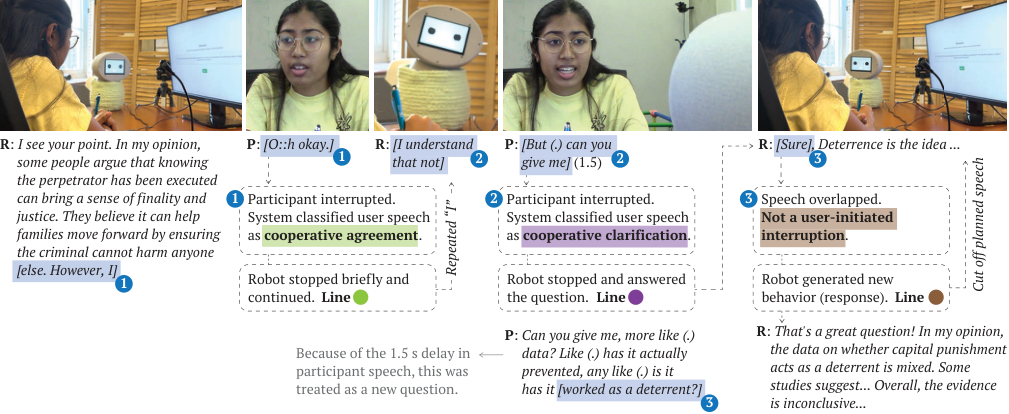
A single turn can contain agreement, clarification, and floor exchange. The system adapts its response each time instead of relying on a single fallback behavior.
The evaluation makes the interaction stakes visible. Mis-handled interruptions are not just technical misses; they reduce how included and satisfied people feel in the conversation.
104 / 111
The intent-aware framework substantially outperformed both naive baselines in resolving user interruptions without conversational breakdown.
ASR
The classifier itself held up well. Most failures came from speech recognition errors, pointing to multimodal sensing as the next leverage point.
rho -.43
Failed interruption handling correlated with lower perceived inclusion and lower discussion satisfaction, showing that turn-taking quality directly shapes trust.
"The moment I speak, it wants to just listen. My speech should take precedence over anything it says."
Participant — on expectations for conversational robots
"Luna, we don't have time," and the robot stopped, acknowledged, and moved on. That felt right.
Participant — on a disruptive interruption handled well
This project argues for a higher bar in conversational robotics. Interruption handling should not be a simple stop-or-ignore feature. It is a social behavior layer that helps robots stay readable, collaborative, and appropriately responsive once real conversation begins.