Social presence without a face, a screen, or a large budget.
Lantern was designed around a simple question: how much social presence can you create with the lightest possible hardware footprint? The answer is a soft, hand-scale object that people can hold, tilt, squeeze, and keep nearby.
Low-cost
Affordable enough to prototype, replicate, and distribute.
Portable
Lightweight and easy to bring into real spaces beyond the lab.
Expressive
Simple motion primitives that still read as attention and calm.
Open
Build logic that other researchers and designers can actually reuse.

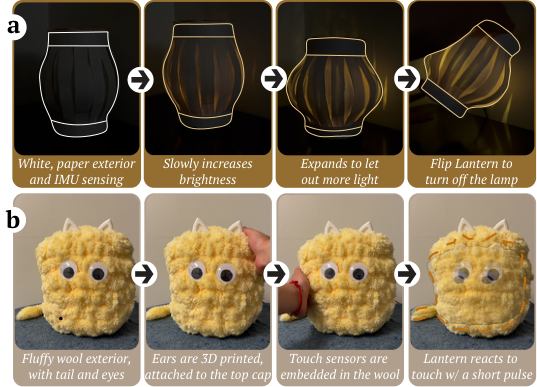
Lantern’s core form: soft-bodied, holdable, and designed to feel present without relying on anthropomorphic cues.
The same platform, multiple social roles.
Lantern works because it is not locked to one script. The hardware is simple enough to travel across therapeutic, educational, and ambient companion contexts.
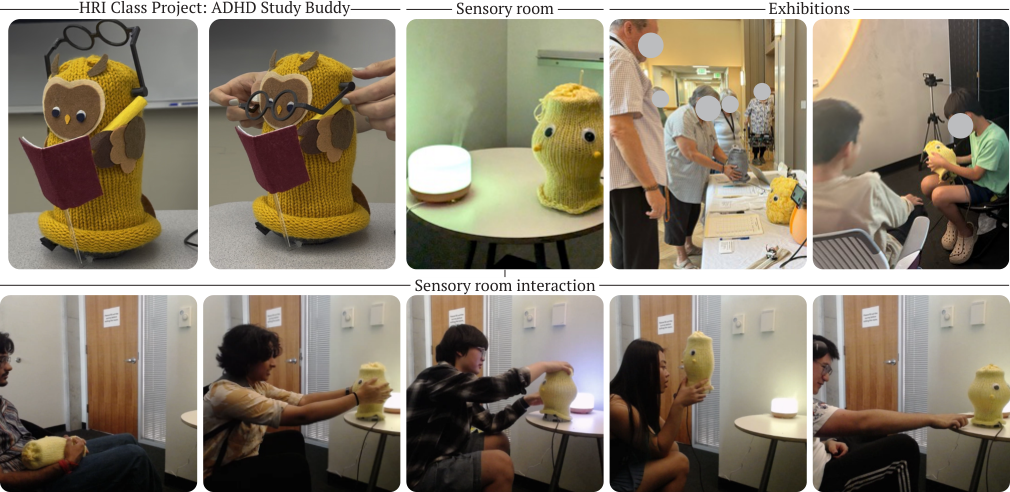
Use cases across bedside support, focus regulation, sensory calming, post-op breathing, and classroom deployment.
Sensory room n=20
Lantern supported calming and focus in a school sensory room, where participants repeatedly described it as responsive, alive, and easy to connect with.
Study buddy Ambient
As an ADHD study buddy, Lantern explored how a quiet object can support attention without feeling like surveillance or interruption.
Post-op care Clinical
Motion, light, and haptics paced breathing in a hospital scenario, offering guidance without a display or spoken instructions.
Teaching platform Open
Lantern also operated as infrastructure: a reproducible robot platform for HRI classes, lab replication, and public exhibition.
People did not just look at Lantern. They handled it.
The strongest part of Lantern is how quickly it invites touch. The form, softness, and scale turn interaction into something closer to handling an object than commanding a machine.

Lantern in use: held in the lap, lifted toward the face, rotated by hand, and treated like a responsive object rather than a tabletop device.
Behavior and material studies shaping how the object signals attention, calm, and acknowledgement.
Study buddy interaction showing how Lantern can support focus through ambient motion instead of command-driven feedback.
Minimal mechanics, enough expressivity.
Lantern’s engineering is intentionally lean. Every degree of freedom had to earn its place by increasing expressivity without making the platform expensive or difficult to replicate.
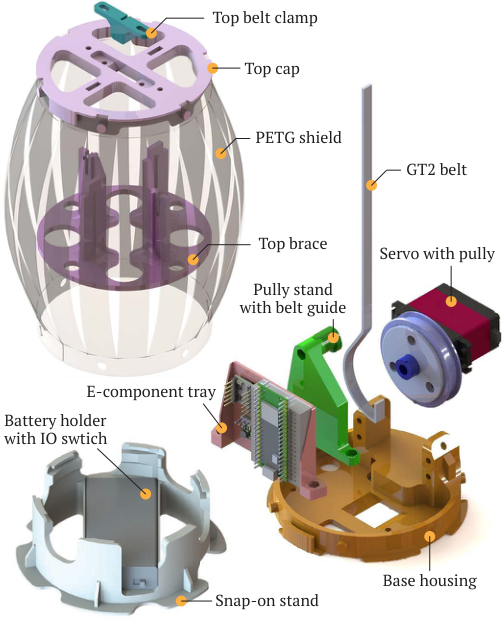
Internal architecture and assembly logic.
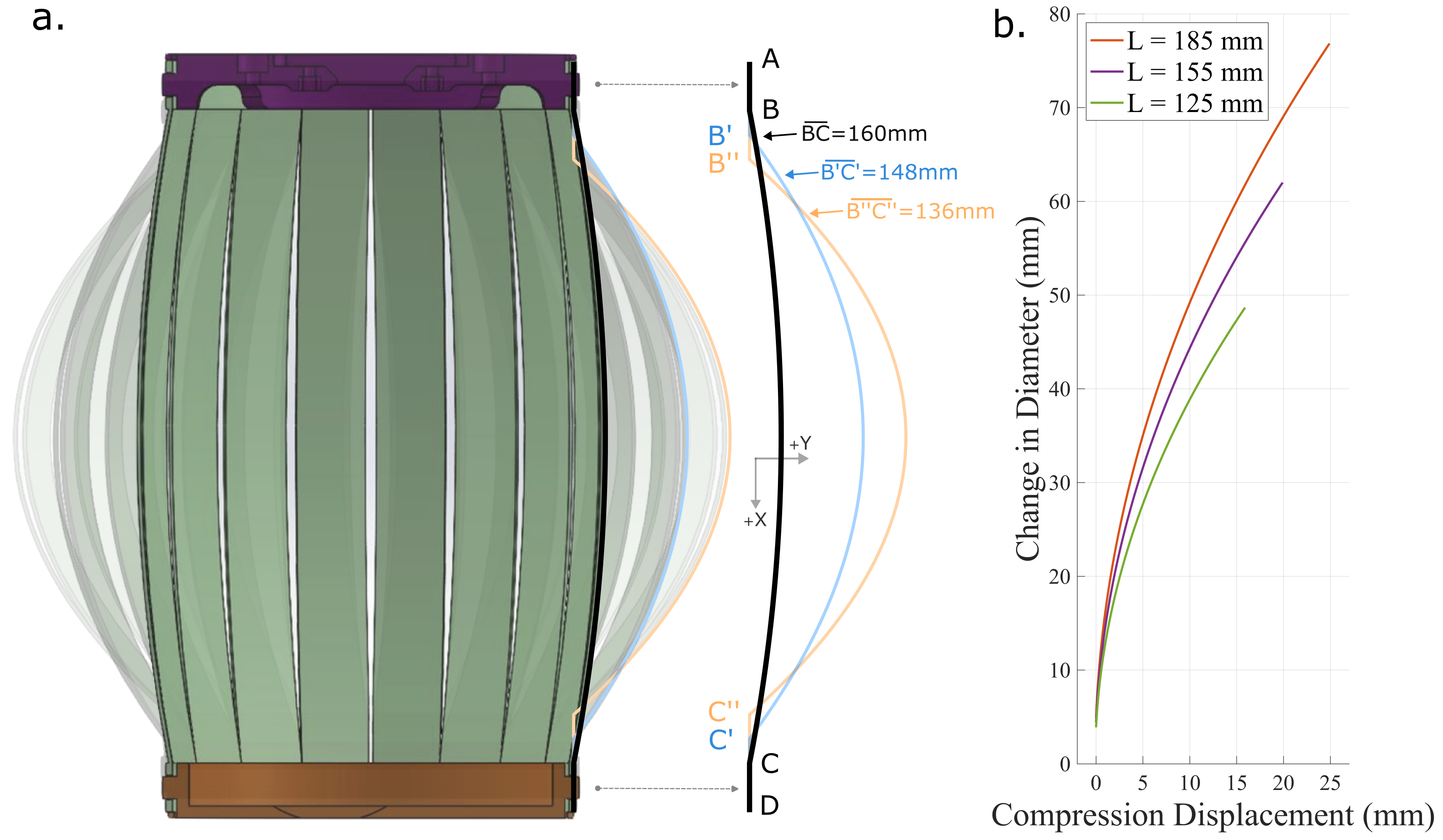
Kinematics and the motion primitives that shape Lantern’s behavior language.
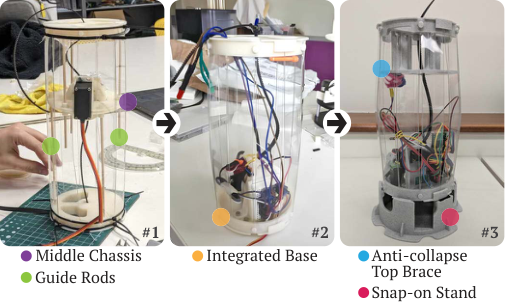
Structural refinement toward an integrated, reproducible base.
Three deliberate choices.
A soft exterior makes Lantern approachable and holdable.
A minimal servo-driven body gives it just enough motion to signal orientation, attention, and calm.
A simple internal architecture keeps the platform open-source, inexpensive, and replicable in under four hours.
Lantern suggests that social robotics does not need to begin with expensive humanoid hardware. A softer, cheaper, more reproducible object can still create attachment, calm, and companionship — while making the research itself easier to distribute.