On-Body Robots
Designing a new robotics category with older adults, not just for them.
On-body robots are not just wearables that track, alert, or assist. They are mobile robotic systems that live on the body itself.
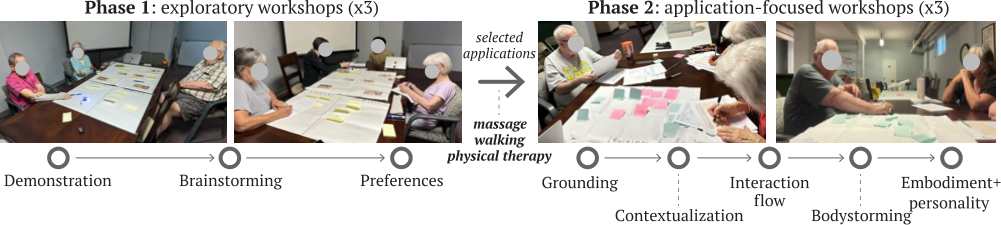
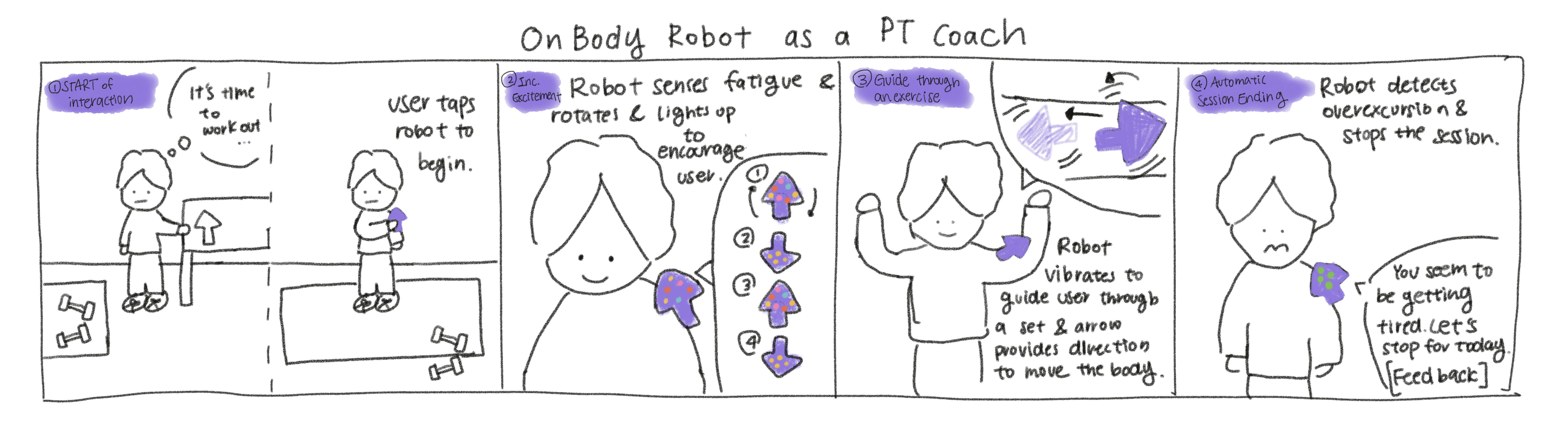
This project used Calico, a sleeve-mounted robot probe, to help older adults imagine what such systems should do, where they should live, and how they should behave.
arXiv 2025
Participatory Design
Wearable Robotics
Healthy Aging
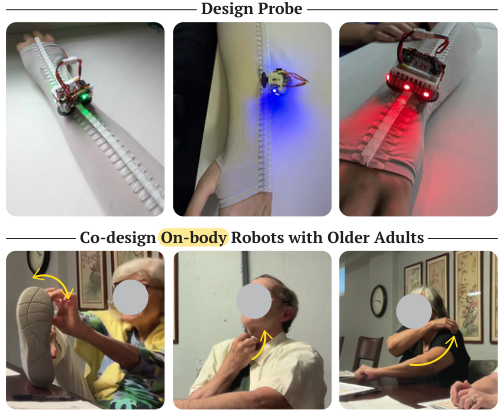
Calico made the idea of on-body robots tangible, giving older adults something concrete to react to, critique, and design with.
Victor Nikhil Antony, Clara Jeon, Jiasheng Li, Ge Gao, Huaishu Peng, Anastasia K. Ostrowski, Chien-Ming Huang
arXiv 2025 · Participatory Design of On-Body Robots with Older Adults