01 · Paradigm
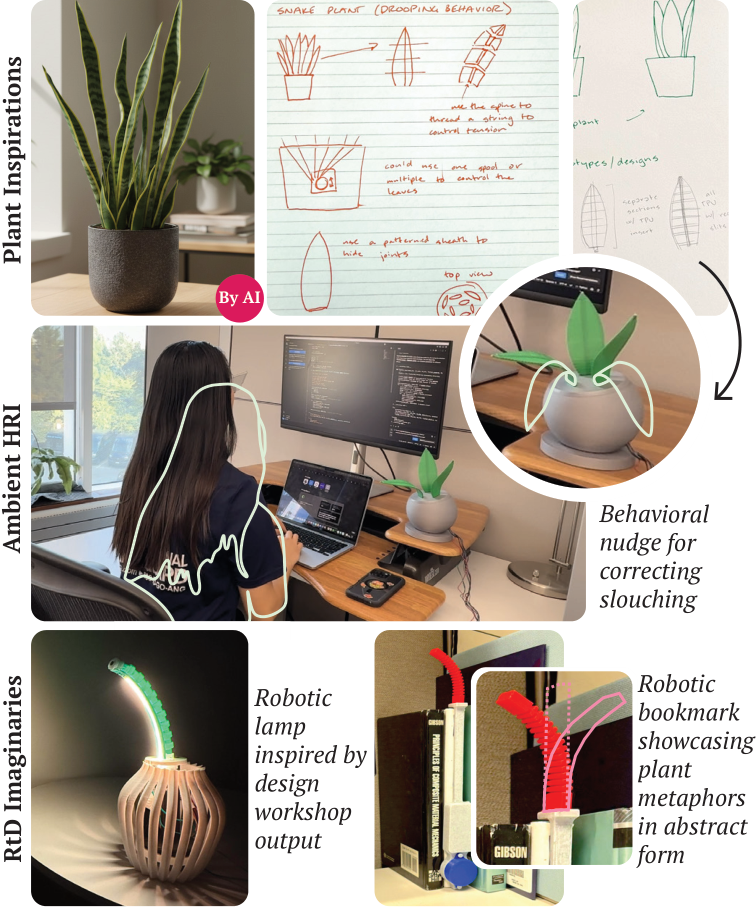
Plants make a strong interaction model precisely because they do not demand attention.
Much of HRI borrows from people or animals, leading to expressive forms that ask for frequent acknowledgment.
Plant metaphors suggest another route: robots that shape atmosphere, invite interpretation, and communicate gradually through the periphery.
Ambient presence
Expression can unfold through timing, posture, and material shifts instead of alerts, speech, or facial reaction.
Interpretive space
Plant-like robots leave more room for people to read intent and emotion into subtle movement without feeling judged.
Designerly contribution
The project builds a vocabulary for an HRI category that is quieter, softer, and more gradual than current robot norms.